車用の内蔵型GPS受信機。 車のナビゲーターからPDAを構築する方法。 GPSナビゲーターとしてのラップトップ
今日のカーナビゲーターの大部分がWindowsCEに基づいて動作しているとは思わないかもしれませんが、オペレーティングシステム自体は、coristuvachの中空ハンドルからバイブレーターに接続されています。ワインはzayvogoをnakoїvしないこと。
許してみましょう。ただし、根本的な方法で、Windows CEのネイティブグラフィカルシェルを、Windowsの起動時に開始するため、追加するビルダーのようなシェルに置き換えます。 一方で、それは良いことです。よりスマートなメニューで、主な機能は1〜2回のクリックで起動しますが、一言で言えば意味がありません。 反対側からのエールでは、周囲のcoristuvachはこの機能を奪われており、virobnikを置いた後、プログラムをインストールする機能は転送されません。 ただし、GPSナビゲーター、データケーブル、コンピューターのみが必要な場合は、正義の勝利を確立するのはさらに簡単です。これらは、ActiveSyncモードのWinCEデバイスとある程度の空き時間で使用できます。
尊敬!この指示は普遍的ではありませんが、最善を尽くします。 ゼロからの悪用と創造的な実験は、ナビゲーターを非生産的な状態に導く可能性があります。これは、点滅することによってのみ変更できます。 働く必要がないと思われる場合は、働かないでください。
オッツェ、ガガーリンと言っているかのように:「行こう!」:
私は理解していませんでしたが、画像の軸はすべてを見る必要がありました。

スマット以外のものを削らないでください。さもないと、ホールの蒸れたものを取り除くチャンスがさらに大きくなります。
その結果、vykonannyatsikhのシンプルなDIYvy zナビゲーターは、必要なプログラムを簡単にインストールできる機能的なPDA全体を取り除きます。 Dribnitsaは大歓迎です。
Z.I. とんでもない! あなたは感じますか? 家具はありません! 酔っ払ったり、石で打たれたり、刺されたり(座席が必要)されているNaviteは、Windowsでパスワードを設定しないでください。 あなたが見ているものに驚嘆する方法を備えたNavit!
完全に機能するPDAは、ミラー写真の基本を学ぶ方法を教えることができません。新しいPDAでは、アマチュア写真家向けの指示を書き留めることができるため、悪臭は常にあなたの手に渡ります。
Arduinで多くの実験を行った後、GPRSを介してサーバーへの座標を修正するシンプルで高価ではないGPSトラッカーを作成しました。
Arduino Mega 2560(Arduino Uno)、SIM900-GSM / GPRSモジュール(サーバーに情報を送信するため)、GPS受信機SKM53GPS。
すべてがebay.comで購入され、合計は約1500ルーブルです(arduinoの場合は約500ルーブル、3つ少ない-GSMモジュール、3つ多い-GPS)。
GPS受信機
GPSロボットを使い始める必要があります。 ビブラニウムモジュール-見つかった最も単純なものの1つ。 ティムもそうです、スピーカーは衛星に関するデータを保存するためのバッテリーの存在を発表しました。 データシートによると、コールドスタートは36秒かかるとのことですが、私の考えでは(サブウィンドウの上に10個、ブース番号の近くに)20回ものホイリンがかかりました。 Nastupnyスタート、プロテ、すでに2hvilin。
arduinoに接続されているアタッチメントの重要なパラメータはエネルギー供給です。 arduinoを変更したい場合は、燃え尽きる可能性があります。 primachの場合、最大電源は[email protected]です。 必要な入力(5V)までの圧力に対するストラムの強さを示す仕様のNavischoは、私には謎です。 ティムは小さくありません、45mAはarduinoの硝子体を変えています。
繋がり
GPSは、可能であればRXピンをチェックしません。 何のために-nevidomo。 この暗号でできる主なことは、TXピンからNMEAプロトコルデータを読み取ることです。 Rivnі-5V、arduino用のyakraz、速度-9600ボー。 有効なシリアルのArduinoVCCにはVIN、GNDにはGND、RXにはTXを接続します。 TinyGPSのライブラリから、手作業でデータを連続して読み取りました。 驚いたことに、すべてが読み取り可能です。 Unoに切り替えた後、たまたまSoftwareSerialを獲得し、問題が発生しました。シンボリックサポートの一部が使用されました。 TinyGPSには無効な通知があるため、それほど重要ではありませんが、質問することはできません。1Hzの周波数を忘れることができます。SoftwareSerialにはほとんど敬意がありません。Uno(USBシリアルに接続されている)にはハードウェアポートがないため、ソフトウェアを獲得する必要があります。 そのため、ワインからは、転送の代金が支払われるピンに対してのみお金を受け取ることができます。 ウノツェ2と3の港で。それ以上に、1時間はそのような港を1つだけ取ることができます。
軸はテストスタンドのように見えます。

GSM受信機/送信機

現在、cicavishaパーツは修理中です。 GSMモジュール-SIM900。 VіnはGSMとGPRSをサポートしています。 EDGEも3G以上もサポートされていません。 座標に関するデータの転送には、おそらくそれは良いことです。モードを切り替えるときに問題はなく、同時にGPRSも、少しかかる場合があります。 プロテ、いくつかの折り畳み式の追加のために、あなたはそれを使うことができます。
繋がり
モジュールは、最後のポート自体によっても制御されます-5V。 そして、ここでは、RX、TXが必要です。 モジュールはシールドなので、arduinoにインストールできます。 さらに、sumisnyはメガのようなものなので、unoです。 ロックのセキュリティ料金-115200。メガを選択すると、ここで最初の許容できない驚きがチェックされます。モジュールのTXピンがメガの7番目のピンで使用されます。 7番目のピンには、アクセスできないメガのperevannyaがあります。これは、たとえば6mから7番目のピンを取得し、その上でperevannyaを取得できることを意味します。 このランクでは、arduinoマルノの1ピンの価値があります。 まあ、それはメガツェーにとって怖いことではありません-それでもpіnіvvistachaє。 そして、宇野の軸はすでにもっと折り畳み可能です(おそらく、2つのピンしかなく、2と3を変更する必要があります)。 この問題の解決策として、モジュールをarduinoにインストールするのではなく、交換することを提案できます。 次に、Serial1を引用できます。
接続すると、モジュールと「通信」するように求められます(モジュールをオンにすることを忘れないでください)。 後続のすべてのポート(mezで4、unoで1)が使用され、すべてのプログラムが同じ速度で動作するため、ポート速度-115200を選択します。 そのため、データの安定した送信に到達できます。 理由-わかりません、推測したいのですが。
また、atzとsilenceによって編集された、最後のポート間でデータを転送するためのプリミティブコードを記述します。 それは何ですか? ああ、敏感なように。 ATZはOKです。 やったー、モジュールは私たちを感知することができます。 興味を持って電話してみませんか? ATD + 7499…電話をかけてください。arduinoがなくなり、ラップトップが破壊されています。 ZgorіvはArduinoを刷新しました。 6〜20Vを使用できると書かれていますが、19ボルトでヨガを実行するのは悪い考えでした。7〜12Vをお勧めします。 GSMモジュールのデータセットでは、前進への圧力の遅れについてはどこにも述べられていません。 さて、メガはスペアパーツの倉庫を破壊しています。 私は心の初めからラップトップの電源を入れ、USBから+19Vオン+5Vラインを獲得しました。 PratsyuєとnavitUSBは機能しませんでした。 zahistのためのDyakuyuレノボ。

勝利を収めた後、私は自分が良くなっているというストラムに冗談を言った。 したがって、軸、ピーク-2A、標準-0.5A。 だから私はarduinoを変える力を与えませんでした。 食べ物を食べましょう。
プログラミング
このモジュールは、幅広い伝送の可能性を提供します。 音声通話とSMSで始まり、GPRSをきっかけに終わります。 さらに、残りの部分については、追加のATコマンドに対してHTTPを要求できます。 スプラットを右に持ってくるだけでなく、ヴァルトにも持っていくために:あなたは本当に手で飲み物を作りたくありません。 GPRSを介したデータ伝送チャネルの許可に関するいくつかのニュアンス-従来のAT+CGDCONT = 1、IP、apnを覚えていますか? だから、ここからあなたはそれを自分で必要としますが、もう少し狡猾です。最初のURLの背後にあるページを削除するには、次のコマンドを送信する必要があります。
AT + SAPBR =1,1//キャリアキャリアAT+SAPBR = 3,1、 "CONTYPE"、"GPRS"//接続タイプ-GPRSAT+ SAPBR = 3,1、 "APN"、 "internet" // APN 、Megafonの場合-インターネットAT + HTTPINIT//HTTPを初期化しますAT+HTTPSARA = "CID"、1//vikoristannyaのキャリアID。 AT + HTTPSARA = "URL"、"http://www.example.com/GpsTracking/record.php?Lat=%ld&Lng=%ld"//座標がAT+HTTPACTION=0のsprintfの場合はカスタムURL//データをリクエストGETメソッドを使用する//データを取得するAT+HTTPTERM // upinity HTTP
その結果、呼び出しをわかりやすくするために、サーバーの名前を削除します。 したがって、実際には、サーバーがGETで座標を受け入れるため、座標に関するデータをすでに追加しています。
生活
変換ArduinoのようなOskіlkiGSMモジュール、私がそれを得たように、腐った考え、同じebayで変換12v-> 5v、3Aを購入するのは間違っていました。 ただし、モジュールに5Vから電力を供給する必要はありません。 ハックに行きましょう:5Vをピンに接続します。ピンには5Vがarduinoから供給されます。 次に、モジュールのコンバーターがインストールされている場合(arduinoのコンバーターであるMIC 29302WUの場合は少し強力です)、モジュールが必要とするものに5Vから電力を供給します。サーバ
プリミティブを記述したサーバー-座標を取得し、Yandex.mapsにペイントします。 豊富なcoristuvachsのサポート、「警戒中/警戒なし」のステータス、自動車システムのキャンプ(飛行、ヘッドライトなど)など、さまざまな機能を追加することができます。車のシステム。 明らかに、完全な信号化にスムーズに変換するトラッカーサポートを備えています。ポーランドのテスト
ケースなしでデバイスを選択すると、軸は次のようになります。
再通電装置を取り付けた後、システムは次のようになります。 
ダーツをはんだ付けした後、arduinoパッドから接点のスプラットを織ります。 こんな風に見える: 
車に12Vを接続し、モスクワをドライブし、トラックを終了しました。 
Krapkiトラックは、一方通行で終了します。 その理由は、GPRSを介してデータを収集するのに多くの時間がかかり、その時間中は座標が読み取られないためです。 Tseは明らかな許しのプログラミングです。 GPRSモジュールを備えた非同期ロボットによって、別の方法で、時間ごとに座標のパケットを修正することによって、最初の方法で喜んでください。
車の助手席で仲間を探す1時間-いくつかのhvilins。
ヴィスノフキ
些細な作業でなくても、ArduinoでGPSトラッカーを自分で作成することは可能です。 同時に汚い栄養-ワインが重い要因(水、温度)の流入に陥らないように、車のアタッチメントを隠す方法、金属で閉じられていない(GPSとGPRSがスクリーニングされている)、そして特にそうではなかった記憶に残る。 今のところ、サロンに横になって喫煙者の巣に接続するだけです。トラッカーのメインタスクが必要な場合は、スムーズトラックのコードを修正する必要があります。それだけです。
ヴィコリスタニ別館
- Arduino Mega 2560
- Arduino Uno
- GPSスカイラブSKM53
- SIM900 GSM/GPRSシールド
- DC-DC 12v->5v3Aコンバーター
専門店には、さまざまな価格帯のさまざまなGPSアタッチメントがあります。 機能が拡張されたより硬いモデルは完成させるのに費用がかかり、最も単純なビーコンは手頃な価格で放送されます。 ティムも同様です。迷子になって自分の手でGPSトラッカーを準備しようとする人はたくさんいます。 どのくらいの折り畳みが必要ですか、їїvyshennyaには何が必要ですか、そしてzusillaを染色するために本当に何が必要ですか?
GPSトラッカー用のスマートフォンwiki
GPSトラッカーやビーコンなどのGPS機能を備えたスマートフォンを獲得するには、ソフトウェアのセキュリティを少し修正する必要があります。 Android、Windows Mobile、またはiOSをベースにした携帯電話で自分の手でGPSトラッカーを構築するのはさらに簡単で、どんな種類の構造も必要ありません。 スマートフォンのように、車のトラッカーのようにzastosovuvatisyaになり、車両の電気システムに接続すると、不器用な操作を実行できるようになります。
スマートフォンをトラッカーに変えることができる小さなプログラムを使用してください。 Androidプラットフォームにインストールするには、Google PlayでLokiプログラムをダウンロードし、スマートフォンでヨガを実行してインストールします。 以下の機能を有効にすることをお勧めします。
- 自動実行;
- povіdomlennya(bazhannyamの場合);
- zvnіshnєzhivlennya(zvnіshnydzherelzhivlennyaに接続されている場合のvykoristannya代替nalashtuvannі);
- 目覚めの外(バザニャムの後ろ);
- コマンドラッピング。
ナビゲーション(交換の定義)の場合、四半期ごとに1回データ更新間隔を設定することをお勧めします。 ディストリビューション「Podії」zdіysnyuvativіdpovіdnoのNalashtuvannyaは当局のニーズに応えます。
登録が完了すると、Asgard Webサイトに登録して添付ファイルを追加し、識別子を示してLokiプログラムに割り当てる必要がなくなります。 その結果、配布エリアの標識がサイトの地図に表示されました。これは、すべてが正しく設定されていることを意味し、スマートフォンはトラッカーとしてラベル付けされ、Asgardを通じて表示されます。
また、Androidの場合はGPShome Trackerプログラムを微調整でき、WindowsMobileの場合はPocketPC用のGpsGateクライアントです。 スマートフォンをトラッカーやビーコンに変換するときは、タイムゾーンを正しく設定することが重要です。
Wi-FiおよびGSMネットワークを介して座標を割り当てる場合、母親は無制限のモバイルインターネットにアクセスする責任があるため、ネットワークを最適化できる料金を選択する必要があります。 勝利者の電話をトラッカーとしてオンにする場合は、インターネットにアクセスするためだけにSIMカードを挿入し、通話には挿入しないことをお勧めします。 座標の精度を高めるGPS受信機の使用は非常にエネルギーを消費するプロセスであるため、次の懸念事項は、自己完結型トラッカーの寿命の安全性についてです。 自動プラグ(タバコのプラグ)の下端をトリミングし、充電コードを電話のUSBソケットに挿入する必要があります。 トラッカーをオンボードシステムに直接接続するには、パワーストリームの下部コンバーターを追加する必要があります。 また、電子機器についてほとんど知らない人は、コンデンサとスタビライザーのペアを備えたコンバーターのアナログを選択できます。
自給式トラッカー(ビーコン)として、車の動きの背後にある固定された堅牢性で勝つことが計画されているため、消費時に簡単に到達できるように配置する方法を検討する必要があります。 І電話にはインターネット用のカードがあり、電話をかけるため、サイレントモードを有効にすることを忘れないでください。
優れた携帯電話で日曜大工のGPSトラッカーを作成する方法
GPSのない携帯電話の最も単純なモデルは灯台に変えることができますが、そのためには追加の所有物が必要であり、より多くの知識を報告する必要があります。 必要な材料とツール:
- 携帯電話;
- GPS/GPRSモジュール;
- GPS受信機;
- アダプター(古い充電器のアタッチメントは、プラグが機能している状態で変更できます)。
- 下部とはんだごて。
ライフブロックの側面から充電アタッチメントを切り取ったら、ダーツを掃除してモジュールボードにはんだ付けし、プラグを電話のライフソケットに挿入する必要があります。 Potimvmikaєtsyapriymachとnalashtovuєtsya電話。 そのような別棟の助けを借りて、あなたはまるであなたが故郷に属しているかのように携帯電話のためのスペースを提供することができます。 それらの座標に関する情報は、最も目立つテキストメッセージの前で、GPSモジュールに接続された携帯電話に送信されます。
Deyakіオペレーターmerezhiproponuyutサービス「ビーコン」、GPSモジュールのない携帯電話で可能です。 加入者の連絡先のリストが作成されています。そのような連絡先のリストが必要です。 座標を処理するには、挿入されたフォームにリクエストを送信する必要があります。
電話なしでGPSトラッカーを使用できますか
GPSモジュールを備えた複合施設でスマートフォンや電話を使用する代わりに、GPS機能(ラップトップ、PDA)を備えたアタッチメントを使用することもできます。 原則はスマートフォンの場合と同じです。プログラムのインストール、インストール、登録がサイトに追加されます。
また、GPSモジュールと受信機を自分の手でどのように拾うことができますか?ビーコンまたはトラッカーをどのように構築しますか? 倉庫tsikh別棟に入るdeakіコンポーネントの軸:
- フォトレジスター、短い音;
- バイポーラトランジスタの改善のための運用サポート。
- vipryamlyach;
- コンデンサタイプコントローラ;
- フィルター部品;
- インパルストリガー。
これらすべての詳細を購入できます。スキームを作成します。インターネットでそれを知ることはできますが、誰もが自分の手でGPSトラッカーを作成する方法を学ぶことができるわけではありません。
自己完結型設計の長所と短所
古くて非伝統的な電話(スマートフォン)として、トラッカーに変換する主な利点は経済性です。 自分のニーズに合わせてデバイスを入手する方法、自分の手でGPSトラッカーを準備することによる節約は、実際にはほとんど気づかれません。 携帯電話とGPSモジュールの設計は面倒で、人々はそれを扱いやすく持ち運び、車に取り付けた場合、ワイヤーを剃る大きなリスクがあります。 スマートフォンは、トラッカー、またはvikoristovuvatyのビーコンのようなものですが、より便利なのは、フォローしている人だけです。 車にインストールするのは最善の解決策ではありません。元のトラッカーは自信よりも有利ではない可能性があります。
- pratsyuєvіdバッテリーの時まで;
- トリックなしで、それらは船内の手すりに接続され、最小限のエネルギーを節約します。
- 広い温度範囲、より低い電話での操作のためのアプリケーション。
- zavdyaki気密ボディはzvnіavtomobilyaをインストールすることができます。
- 打撃に反応する、rozgoduvannya auto;
- アラームボタン、マイク、さまざまなセンサーを装備することができます。
スマートフォンをフックオンリグとしてごまかすのと同じように、コミュニケーターの機能はごまかすことはできません。
GPSトラッカーまたはビーコンを購入し、スマートフォンまたは優れた携帯電話に基づいて自信を持ってアタッチメントを下げることをお勧めします。 ファクトリートラッカーは、トランスポートzasibにインストールするのに最適で、より多くの機能を備えています。 トラッカーを購入するコストはそれほど高くなく、スマートフォンを速いペースに変換することは、わいせつなデバイスの自明性に対してのみ当てはまります。
現在市場に出回っている人に関係なく、さまざまな価格帯と機能の非個人的なGPSデバイスを見つけることができます。誰もが既製のナビゲーションデバイスを購入し、自分の手で自由に購入できるわけではありません。 チーはスムーズに言う必要があります、エール、間違いなく、それは可能です。
Vlasnyナビゲーターは、2つの異なる方法で使用できます。 最初のものには、最も単純なモバイルデバイス、GPS送信機、およびバッテリーが必要です。 先のwartoの前では、報告可能なナビゲーターをそのように見る意味がありません。多くの手間と1時間かかります。さらに重要なことに、電子機器とシステムプログラミングの基本を整理する必要があります。 -だから、それらのすべてではありません。 その前に、そのような折り畳み式のナビゲーターには勝利者がいて、あなたに知らせるために仲間を求めます、私たちはあなたから座標を取ります、それであなたはそれらを地図に載せることができます。
スキンを作成するもう1つの簡単で効果的な方法は、ラップトップを使用して支援するGPSナビゲーターです。 誰のために何が必要ですか? 最初の方法では、ラップトップ自体、別の方法で、たとえばGPS受信機が現在の携帯電話で使用されています。
GPS受信機は、ポータブルPCからあらゆる種類のインターフェイス(Wi-Fi、Bluetooth、またはUSB)に接続されます。 今年の残りの期間は肌にとって実用的ですが、それまでは、ナビゲーターにとっては、最も単純なネットブックやタブレットをナビゲートするだけで十分です。
GPSモジュールを接続する前に、それを処理する必要があります。これにより、PCに別のプログラムセキュリティが設定され、インストールできるようになります。 インターネットからヨガを知り、活用することは困難の倉庫ではないので、ここでの選択は信じられないほど素晴らしいです。 Deyakіプログラムは、長距離での海外旅行、deyakі、navpaki、都市による旅行のためにpіdіdutをプログラムします。 PCはインターネットにアクセスできるので、渋滞に関する情報を提供するプログラムをインストールすることもできます。
ナビゲーターをPCに接続した後、チェックインする必要がありますが、システムを指定することは可能ですが、ドライバーを追加する必要がありますが、それらをインストールする必要があります。 検索を行う必要はありません。インターネットに自動検索をインストールするだけです。 添付-ナビゲーションプログラムを実行して変更すると、添付ファイルが表示されます。 すべての準備が整っていれば、自己完結型のGPSナビゲーターの準備ができています。問題のせいにする場合は、パッチを適用したソフトウェアを調べてみる必要があります。
Chi vartoは、自分の手でナビゲーターを作成するか、購入するよりも優れています-判決裁判所のvirishuvatiスキン。 それがvipadの場合でも、最初のvipadの場合でも、別のvipadの場合でも、zusilを報告して1時間過ごす機会があります。
受信者には次のデータが表示されます。
- 座標-ポイントの緯度、経度、高度。
- GMTから1時間後-年、hvilini、秒
- 彼らの優位性によって明らかにされた多数の仲間
- 信号を受信する衛星の数。
Primachは200ピクセルを記憶できます。 メモリは、特定の瞬間に受信機によって示されるポイントの座標を保存することもでき、地理マップからのポイントの座標を受信機のメモリに記録する機能も追加されます。
ヘルプが必要な場合は、受信機が配置されているポイントの真の(磁気と混同しないでください)方位角を、メモリから選択した任意のポイントまで決定できます。
EB-500モジュールは、モバイルアプリケーションに最適です。シャードは、サイズが小さい場合と小さい場合があります。
モジュールに到達できる信号である衛星の数に応じて配置される座標の精度は、3以上である可能性があります。
衛星ディスプレイの場合、バイコリストモジュールには66チャネルがあり、パッシブアンテナとして28mAを使用します。 チャンネル数に衛星が出現した後、その後、落ち着くストラムが変化します。
寿命の電圧は3〜4.2ボルトです。
モジュールからの呼び出しは、2つの等しいUARTに対するものです。
UARTピン-TX0、RX0およびTX1、RX1。
抵抗ライトダイオードを介したGPSステータス接続の出力。 衛星からの信号がインストールされていない限り、論理1灯ダイオードは着実に燃焼し、衛星が検出されると、1Hzの周波数で点滅します。 ヨガスキームの調整後、あなたはそれを取ることができます。
Visnovok V_RTC_3V3 –このvysnovokの場合、生計を立てる必要があります。これがないと、モジュールは起動しません。 モジュールの電源を入れるか、標準の3ボルトCRタイプのリチウム電池を接続し、モジュールのメモリにすべてを保存してから、レシーバーの電源を切ります。 RTCの速度低下は1µA未満であるため、バッテリーを長時間引き出す必要があります。
VIN_3V3を表示するためにライフが送信されます。
アンテナはRF_INPUTが表示されるまで接続されます。 モジュールとアンテナフィーダーを接続するトラックは、側面から土のポリゴンから短いトラックにすることができます。 私はパッシブアンテナを持っています
その下のポリゴンから35*35 70*70。 森のガリャビンの霧で問題なく起動しました。 そして、精度はまともです。
優れたアクティブアンテナは高価ですが、優れたLNAは安くはありません。 強力なオーバーシフトを念頭に置いた安価な中国のアンテナは、そこに見られるように、それ自体がより受動的であることが示されました。subsiluvachはそれほど低ノイズではありません。 さらに、最低3.3ボルトで動作し、モジュールからラインに供給されます。
2.8 V。これには、RF_INPUTを出力し、アンテナを開き、生命の音を開始するためにコンデンサから定電圧を出力する必要があります。これには多くの問題があります。
モジュールからのノイズが乱されないように、アンテナをモジュールの指示に従って配置しないでください。
GOOGLEマップのTseは、仮想点の座標をプロットしました。 Vіdstanvіdstіnibudinkuvіdvіdvіd10mіv。

さらに、モジュールがボードにはんだ付けされるため、VIN_3V3とV_RTC_3V3が接続され、光の光に応じてアンテナがオンになり、すべてが正常に機能します。速度を確認する必要があります。UARTを交換します。 マイクロコントローラのUSAR(同期非同期受信機)のプログラミングに必要です。
RX1、TX1またはRX0、TX0をMAX3232経由で接続します(3ボルトに適用) ■コンピュータのCOMポート。 USBの場合、トランジションをFT232RLにはんだ付けできます。これは、すべてのオペレーティングシステム用のドライバーを備えた安価で優れたマイクロ回路です。 問題なく注文しました。
私が115200で獲得したデータシート9600に従って、どのモジュールでどのように見えるかを速度を変更します。 obov'azkovymではない信号-光が当たらない場合があります。 私はCVAVRで端末を使用するか、無料のTerminalv1.9bプログラムを使用しています。これはすでに便利です。
交換はNMEA0183プロトコルに基づいています。



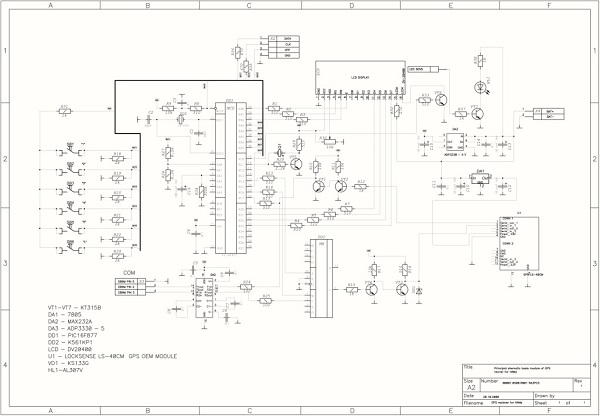
ATMEGA16バインディングが標準です。 Visnovok REZETは、10kオームの抵抗で生き生きとしています。 クロック周波数は、7.3728MHzの水晶振動子によって決定されます。 マイクロコントローラーのADCへのライブ電力は、LCフィルター(10μHインダクター、1μFコンデンサー)を介して供給されます。 ADC基準電圧監視AREFは、ADC電圧監視では無効になっています。 スキームのプログラマーのためのRoz'emは証拠ではありません。 ポートB接続へLCDディスプレイWH1604B-16文字の4行。 Substroyuvalnym抵抗R220kOhmはコントラストを調整します。 バッテリーの充電を節約するために時計を切り替えるためのボタン。
UARTモジュールとガルバニックデカップリングとしてのUSARTマイクロコントローラの間に、ADUM1201マイクロ回路が取り付けられています。 オシロスコープで見たモジュールあたりのパルスの最大振幅は、2.8 V以下です。マイクロコントローラは、2.5Vあたりの単一パルスとしてパルスを受信します。 ADUMのトラブルを取り除くには、もっと早く入れてください。
AT24C128チップは、I2Cバスインターフェイスを備えた電気的に消去およびプログラムされた永久メモリ(EEPROM)です。レシーバーメモリ、200ポイントのデータすべての削除、ただし最後のデータについてです。 シリアルリンクとCDAシリアルデータ送信のCDL同期、および障害のアドレスは、4.7〜5.1kオームの抵抗によってプルアップされます。 VisnovokWP-zahistvіdrecordz'єdnanyzGND。 Visnovki A0、A1-少数のマイクロ回路がバスに接続されているかのように、ドライバーのアドレス指定が切り替えられ、4つの組み合わせが可能です。 A0、A1がGNDに接続されている1つのマイクロ回路があります-アドレスはゼロまでです。
手術室には医者が選ばれた。 バッテリー電圧が測定され、マイクロコントローラーのADC入力(ビットポートA)に印加されて、リチウムバッテリーの電圧値が制御されます。
タクトボタンのspilkuvannyaіzpriymachemzіbranaのキーボード。 READボタンとWRITEボタンは時計です。 ホバーボタン-固定付き。 マイクロコントローラのポートを焼き付けないように、ストラムの交換には300オームの抵抗器が必要です。
さて、プリマチャを食べることについて。 私は3.7ボルトのリチウム電池を持っており、約4.15ボルトの新しい充電があります。マイクロコントローラーにクォーツ7.3728 MHzとWH1604ディスプレイで電力を供給するためには、5ボルトが必要です。 ディスプレイ上のデータセットでは、Vdd 3〜5ボルトの価値がありますが、コントラスト比と電圧を3.3ボルトに調整するための標準的なスキームでは、何も表示されません。
EB-500モジュールに3.3ボルトを印加します。 LM2623マイクロ回路では、パルススタビライザーが選択されており、5ボルトに移動します。 LM2623マイクロ回路は、デジタル機器用に特別に設計されており、ノイズレベルが低く、バインディングが最小限に抑えられています。 ノイズリダクションのためにコンデンサC4とC5が追加で取り付けられています。
EB-500モジュールの寿命は、LP2980-3.3ラインスタビライザーの出力から取得されます。 かなり低い電圧のマイクロ回路は、それに最大50 mWを費やし、少し熱くなり、実質的にノイズなしで3.3ボルトを安定させることができます。

プログラムについてです。 Vikoristanyコンパイラ。
NMEA 0183プロトコルは豊富な情報で満たされている必要がありますが、座標、時間、海抜の高さ、可視衛星と勝利衛星の数を超えてチャープすることはできません。 そのために、3つのリマインダーのみを選択します(必要な情報はchervonimで表示されます)。
1. $ GPRMC、181057.000、A、5542.2389、N、03741.6063、E、0.47,74.50,190311、A * 51
ここで、Aがデータ有効(є信号)の場合、Vが無効の場合、文字番号18(0から始まります)をクリックする必要があります。
2. $ GPGGA、181058 .000,5542.2389、N、03741.6063、E、1,8、1.34,115.0、M、14.6、M、* 54
すべての情報をお持ちください。
181058.000-時間
5542.2389、N-緯度
03741.6063、E-寿命
1-GPS修正(0 =データが正しくない、1 =位置が修正されている、2 = DGPS(調整された精度))
8 - 勝利した仲間の数
1.34-HDOP、水平精度
115.0、M-海抜
14.6、M-地理的可視性-地上楕円体WGS-84と海面(ジオイド)の違い
最後のDGPS更新から1時間後は毎日です。
3. $ GPGSV、4、1、13 、28,65,075,17,26,53,202,37,15,50,278,17,27,39,290,24 * 7D
ここでは、11と12の数字で表されています。
13-目に見える衛星のポブナ数。
レシーバーがオンになるとすぐに、ADCが開始され(マイクロコントローラーのADCのADCSRAレジスタに単一の6ビットを設定することにより)、リチウム電池の充電レベルをチェックします。 ADC変換が完了すると、データレジスタから100個の値が取得され、バッテリ電圧の平均値が計算されます。 バッテリーの電圧が3.2ボルトより低いか高い場合は、「 放電アキュムレータ"。 2.7ボルトのバッテリーを放電できる限界電圧。 充電コントローラーでバッテリーを浸す方が良いです。
マイクロコントローラUCSRB=0x90のUSARTレジスタは、受け入れの完了と受け入れの包含の後に再起動が許可されることを意味するものではありません。 受信の完了後に転送を処理する機能は攻撃的です:
(UCSRA&= 0x18)== 0の理由で、データはUDRバッファレジスタから取得されるため、UCSRAレジスタにはフレーミングパードンフラグと再配置フラグはありません。 受信が読み取り/書き込みモード(変更されたフラグ= 1)からリバイされるときはいつでも、データは単にUSART受信バッファーから取得されますが、バッファーはリフローされました。 モジュールと通信する前に、USARTレシーバーを1時間オンにしてみてください。 flag = 0の場合、バッファから取得されたデータが解析されます。 行の先頭(ASCIIコード36の後の$記号、行全体が最後まで)が見つかると、コード13(キャリッジローテーション)がgps配列に送信されます。 次に、シンボルをgps、gps、gpsから変更します。これにより、RMC、GGA、またはGSVの他のすべての情報が無視されることがわかります。 RMCのリマインダー、変更 a GSVのように、GPS配列の要素に相当します。これは、gpsおよびgpsに表示される衛星の数に含まれるシンボルから計算されます。 実際のところ、GGAは転送機能からメインプログラムに転送されます。 プログラムでは、メールボックスがチェックされます a 86 ASCIIコードの後ろの記号Vは信号の存在であり、ディスプレイには「 信号なし”

a = 65を変更する方法-記号Aは、信号が発生したことを意味するものではありません。 すべてのGGA情報、呼び出す必要のあるすべてのデータが配置されているgps配列に移動しましょう。 時間、座標、リンクが設定されている衛星の数、海抜の高さを計算します。 このすべてのデータに加えて、リセットサブプログラムによって計算された可視衛星の数がバッファに配置され、LCDで表示され、表示画面に表示されます。 この写真が出てきます:

最初の行には、ポイントの緯度とコンパニオンの数が表示され、リンクが挿入されているコンパニオンのシムが表示されます。 もう1つの行は時間の長さで、表示される衛星の数は11です。3番目の行はUTCから1時間後、海と海からの高さです。
データを記録するには、「記録」ボタンを押します。 すべてのデータは、I2Cバスインターフェースを備えた外部EEPROMAT24C128EEPROMチップメモリに保存されます。 マイクロ回路のメモリは、スキン用の8ビットの16,384行として編成されています。 スキンごとに64バイトの256側に分割された内部16384バイトのメモリ。 レコードは、バイトごととサイドごとの両方で表示できます。 人生の許しのために、記録後のエントリーが選ばれました。 マイクロチップは1バイトをアドレス指定します。AT24Cアドレスの最上位3ビットは101に設定され、残りのビットは書き込みまたは読み取りを示します。 ゼロがレコードであるように、1は読み取りです。 メモリアドレス指定-2バイト、古いビットは若い側の番号-2番目の側のワードの番号です。 出力:0〜255〜8ビットのサイド番号とサイド0〜63〜6ビットのライン番号。したがって、メモリアドレス指定には14ビットが必要です。 上位バイトを削除するには、サイドの番号を取得し、2つの位置で右側に分割します。上位2ビットがリセットされ、サイドのアドレスの上位6ビットが6つの若いビットに移動されます。 同じサイド番号を左に6桁変更して、アドレスの最下位バイトを取得します。ここで、古い2ビットはサイドアドレスの若い2ビットで、他の6ビットはゼロです。 ここで、記録するポイントの呼び出しメモリのアドレス番号を覚えておく必要があります。 どのバイコリストにとって、マイクロコントローラの不揮発性メモリはEEPROMです。 ATMEGA16 EEPROMの場合、512バイトを格納します。 EEPROMには、eeprom unsignedcharadとeepromunsignedcharopredの2つの配列があります。 広告配列はメモリАТ24С128の空き側を指しています。1つはその側が占有されていることを意味し、0は空きを意味します。 例:ad = 0は、メモリAT24С128のサイド20が有効であり、ad=1も占有されていることを意味します。 その前に、外部メモリにデータを書き込むために、インテリジェンスad [g] = 0が見つかるまで、広告配列のすべての要素を繰り返し、要素番号gを0のようにインクリメントします。 古いメモリの側面のアドレスg。 ここで、メモリAT24C128の側面のアドレスを、記憶するポイントの番号に記憶します。 opred[ポイント番号]=g(メモリ側のアドレスАТ24С128)。 ポイントデータを消去する必要がある場合は、ad [消去するポイント番号]にゼロを書き込み、配列opredで要素番号を移動して、ポイント番号からもう1つ消去します:opred [ポイント数]=opred [ポイント数-1]、記録されたポイントの総数が1に変更されます。 メモリからすべてのデータを消去する必要がある場合、記録されたポイントとアレイ広告の数はゼロにリセットされます。 AT24C128に関するなぞなぞに新しいデータを書き込むと、古いデータは消去されます。 記録されたポイントの総数を示す数字を変更することも、マイクロコントローラーのEEPROMにあります。
レコードは次のようになります。
「REC」ボタンを50ミリ秒間押します(すべてのボタンに50ミリ秒の遅延が設定されています)。 最初の行の表示画面には、次のように表示されます。 Tポイント:(ポイント数)」記録されたポイント数 マイクロコントローラのEEPROM内誰に 増加する。 ポイント番号を200に移動すると表示されます メモリー 忙しいこのレシーバーは記録モードを終了します。 別の行では、キーボードから、ロシア語のアルファベットの数字と小文字から最大16文字のポイントの名前を入力する必要があります。 導入の原理は携帯電話と同じです。キーボードボタンをクリックすると、必要な記号が表示されません。 miltsiが設定されると、シンボルは無料で消去されます。 キーボードのキーは、ビット3,4、5をポートDに、ビット2、3、4、5をポートCに接続します。ポートDは出口として固定され、ポートCはリフト付きの入力として固定されます。 周波数が5msのビットポートDでは、ローレベルが適用され、ポートCのビットの値が読み取られます。 3 dezhzhボタンは2.2秒間アクティブです-16ビットタイマーT1は、入力ビットポートCにゼロが表示されると、28800 Hzの周波数で開始します。タイマーが値65535を超えると、再試行が生成され、プログラムは再試行に切り替わります。処理機能。 2.2秒が経過する前に別のボタンがアクティブになると、タイマーがリセットされるとすぐにタイマーが開始され、アクティブなボタンの前に入力されたすべての値がリセットされます。 セットの後、ポイントに名前を付けます。*を押します。 3行目はリマインダーを示しています" フローポイント?”ある瞬間に押す時間で示されるポイントを覚えておく必要があります*、ディスプレイにリマインダーが表示されます“ クラプカ録音このレシーバーは記録モードを終了します。 地図から座標を入力するときに#を押すと、画面に「 緯度?」ドットなしですべての桁の緯度座標を入力します-49˚52「16.54」と入力します。49521654のように入力し、*を押すと、電力が表示されます。 Dovgota?」なので、自分で入力してdovgot、副3618 "51.57"-36185157、次に*。

ディスプレイには「クラプカ録音このレシーバーは記録モードを終了します。 マップから座標を書き込む場合、高さの値は記録されず、座標を読み取る場合、高さポイントの座標はゼロになります。 EEPROM AT24C128のエントリは、次のように順番に読み取られます。
- スマートスタートが形成されています-高SCLのためにSDAのハイキャンプからローキャンプに移動します。
- バイトはマイクロサーキット10100000のアドレスから送信され、残りのビットは0-書き込みです。
- メモリアドレスの最初のバイトが送信され、次にメモリアドレスのもう1バイトが送信されます。
- データのバイトが送信され、アドレスはクレジットされるときにサイドに書き込まれます。 SCL出力が低い場合は、SDA出力を変更します。
- マインドグレインが形成されています-低レベルから高キャンプへの移行、高レベルのSCLのSDAへの移行。
メモリからデータを読み取るには、「読み取り」ボタンを押す必要があります(ポートCの7ビットで、論理ゼロが読み取られます)。ディスプレイには次のように表示されます。 クラプカ:"。 読みたい座標点の番号をダイヤルし、*をエンボス加工します。 ポイントの座標が画面に表示されます。 読み取りモードでポイント番号を入力する場合、キーボードで使用できるのは番号のみです。 記録したポイント数を変更した数を入力するたびに、リマインダーが表示されます。 データなし」、それから私たちは振り返ります:「 クラプカ:"。 メモリにデータを保存していないため、「読み取り」ボタンを押すと、「リマインダーが表示されます。 データなし」その添付ファイルは読み取りモードを終了します。 これは、EEPROM AT24C128から次のように読み取られます。開始、停止、書き込み時と同じ方法でアドレス指定することを理解します。 ポイント座標が記録され、読み取られるアドレス(プログラムの場合、値の変化点の数\ u200b \ u200bnomer_1)は、マイクロコントローラーの操作されたEEPROMアレイで認識されます。 上位アドレスバイトはopred>>2、下位opred<<6. Только после передачи второго байта с адресом памяти посылается байт с адресом микросхемы 10100001, где последний бит 1 – чтение. В программе чтение идет побайтно, сначала считываются байты с названием точки. Считывается байт, по номеру кода в считанном байте определяется строка, содержащая код знакогенератора LCD модуля и символ соответствующий этому коду выводится на экран, затем младший байт адреса памяти инкременируется. Так выводятся 16 символов названия точки. Затем считываются байты с данными широты, долготы и высоты точки. После считывания очередного байта младший байт адреса памяти инкременируется. Все считанные параметры помещаются в буферы для вывода на LCD и выводятся на экран дисплея:

ゼロが下がった後、キーボードの数字2で数字を増やした後、データを再収集できます。 読み取りモード#を終了します。 読み取りモードでは、データを一度に1ポイントずつ、または一度にすべて消去できます。 画面にドットが表示され、消去して押す必要のあるデータ*。 最初の行の例は「店?」確認用*、ただし-#ではありません。 すべてのデータを消去する必要がある場合は、*を続けて押すと、「店?」、1にエンボス加工、zamіst「店?” z'is” 口ひげ?」を確認として-*、ні-#にエンボス加工。 マイクロコントローラのEEPROMアレイ(AT24C128のメモリ内のサイドの正しいアドレスを示すad)に消去すると、ゼロが要素に書き込まれ、その番号は、ポイントのAT24C128内のサイドのアドレスに等しくなります。消去されました。 この側のデータは、他のデータを記録するときに消去されるため、記録モードの受け入れをオンにすることはできません。ドックは表示されません。クラプカ録音”.
受信機が照準モードに切り替わりました。 このモードでは、ポイントへの真の方位角が表示されます。このモードでは、レシーバーのメモリから選択された任意のポイントに対してレシーバーが認識されます。 受信機をガイダンスモードに移行するには、「ガイダンス」ボタンを押します。別のビットポートDが論理ゼロを読み取ります。 画面上で、「 クラプカ:」を計算するポイントの数と方位角を入力し、*を押す必要があります。 この点の座標は、マイクロコントローラーのEEPROM内のkr位置の配列に配置されます。 ポイントの番号と名前が表示画面に表示され、「 ガイダンスこの表示画面は次のようになります。

方位角(287˚1"48")は、4列目の穂軸(3284メートル)に到達した後、表示されます。 したがって、たとえばコンパスєなどの方位角で歩くことができます。 磁気観測-磁気方位角と右方位角の違いは、豊富な地図に示されています。 測地学から便利屋から取得され、フロートタイプのロボットによる変更のために変換された方位角と距離を計算するための式。 ポインティングポイントの座標はマイクロコントローラの不揮発性メモリに保存されるため、「照準」ボタンを無効にしてアタッチメントをオフにした場合は、アタッチメントをオンにした後、そのポイントを照準し続けます。 照準点を変更するには、ボタンを押して信号に到達し、新しい点の番号をダイヤルします。
デザインはフィットします、明らかに、それは最高のものを満たします、しかし何が起こったのか、それらのことが起こりました。
必要なのはBODENだけです。電圧が下がるとスイッチング回路が有効になり、SUT1はスイッチング回路がオンになったときにクロックジェネレータを起動するモードを制御します。 他のものはプログラムされていないので、それらは単独で同等です。
無線要素のリスト
| 予定 | タイプ | 宗派 | Kіlkіst | ノート | スコア | 私のメモ帳 | |
|---|---|---|---|---|---|---|---|
| スキーム1。 | |||||||
| U1 | ICRS-232インターフェース | MAX3232 | 1 | メモ帳を実行する | |||
| EB1 | GPSモジュール | EB-500 | 1 | メモ帳を実行する | |||
| D1 | Svitlodiod | 1 | メモ帳を実行する | ||||
| C1-C5、C12 | コンデンサ | 0.1uF | 6 | メモ帳を実行する | |||
| C8 | コンデンサ | 100 pF | 1 | メモ帳を実行する | |||
| C9、C10 | コンデンサ | 4.7uF | 2 | メモ帳を実行する | |||
| C11 | コンデンサ | 0.01uF | 1 | メモ帳を実行する | |||
| R7 | 抵抗器 | 1 | メモ帳を実行する | ||||
| J1 | Roz'em | RS-232 | 1 | メモ帳を実行する | |||
| アンテナ1 | アンテナローズ | 1 | メモ帳を実行する | ||||
| L1 | インダクタンスコイル | 1 | メモ帳を実行する | ||||
| 1で | ライフバッテリー | 3 V | 1 | メモ帳を実行する | |||
| スキーム2。 | |||||||
| U2 | マイクロコントローラー | 1 | メモ帳を実行する | ||||
| AD1 | マイクロサーキット | ADUM1201 | 1 | メモ帳を実行する | |||
| OS1 | オペレーショナルヘルパー | 1 | メモ帳を実行する | ||||
| AT1 | マイクロサーキット | AT24C128 | 1 | メモ帳を実行する | |||
| C6、C7 | コンデンサ | 0.15uF | 2 | メモ帳を実行する | |||
| C13、C17 | コンデンサ | 0.1uF | 2 | メモ帳を実行する | |||
| C14、C16 | コンデンサ | 22 pF | 2 | メモ帳を実行する | |||
| C15 | コンデンサ | 1 uF | 1 | メモ帳を実行する | |||
| R1、R3 | 抵抗器 | 20部屋 | 2 | メモ帳を実行する | |||
| R2 | Substroyuvalny抵抗器 | 20部屋 | 1 | メモ帳を実行する | |||
| R4 | 抵抗器 | 10オーム | 1 | メモ帳を実行する | |||
| R5、R6 | 抵抗器 | 4.7部屋 | 2 | メモ帳を実行する | |||
| R8 | 抵抗器 | 10部屋 | 1 | メモ帳を実行する | |||
| Y1 | 水晶振動子 | 7.3728MHz | 1 | メモ帳を実行する | |||
| L2 | インダクタンスコイル | 10 µH | 1 | メモ帳を実行する | |||
| DS1 | LCDディスプレイ | WH1604B | 1 | メモ帳を実行する | |||
| K1 | タクトボタン | 1 | |||||










