เครื่องกำเนิดสัญญาณทดสอบทีวีบน Pic เครื่องกำเนิดสัญญาณสำหรับควบคุมโทรทัศน์ ฉันจะสร้างอัลกอริทึมหุ่นยนต์
เครื่องกำเนิดไฟฟ้าเชื่อมต่อกับอินพุตเสาอากาศของทีวีซึ่งทำงานในช่องทีวีช่องแรกหรือช่องอื่น เมื่อดูภาพประเภทต่างๆ บนหน้าจอ คุณสามารถเปลี่ยนสีของ kinescope ให้ได้สีที่บริสุทธิ์และสมดุลของสีขาว แก้ไขการสร้างเรขาคณิต ปรับศูนย์กลางของแรสเตอร์ ปรับโฟกัสให้บาง สิ่งที่แนบมาจะสร้างสนามสีดำและสีขาว หกและสิบสอง sugs แนวตั้งที่มีการไล่ระดับของความสว่าง เส้นแนวตั้งและแนวนอนที่วาดขึ้น เช่นเดียวกับการตรวจสอบและการจับคู่ของสนามและชุดค่าผสมอื่น ๆ อีกมากมายซึ่งสัญญาณสามารถกลับด้านได้ ด้วยวิธีความเรียบง่าย เครื่องกำเนิดจะสร้างแรสเตอร์แถวด้วยจำนวนแถว 315 อัตราเฟรมคือ 49.6 Hz แผนภาพเครื่องกำเนิดไฟฟ้าแสดงเพียงเล็กน้อย Vіnประกอบด้วยออสซิลเลเตอร์ควอทซ์ที่มีความถี่เดียว (DD5.1, DD5.2) ซึ่งเป็นสัญญาณทีวีในอดีต (DD1 - DD4, DD5.3, DD5.4, DD6, DD7) ซึ่งเป็นอุปกรณ์เสริม ( VD5 - VD7, R17 - R19) และเครื่องกำเนิด RF (VT1) ออสซิลเลเตอร์แบบควอตซ์จะสั่นพัลส์ด้วยความถี่การส่งต่อ 4 MHz

เป็นผลให้ที่เอาต์พุตของหลอด VD2 ที่ 15 บนพัลส์อินพุตที่ 16 จะเกิดพัลส์ 0.1 μsซึ่งเป็นไปตามสัญญาณที่มีความถี่ 250 Hz สร้างหมอกควันแนวตั้งบนหน้าจอ Vіdbuvaєtsyaบนจัมเปอร์ SB5 แบ่งความถี่ของการทำซ้ำของลำดับของตัวระบุ D1 ให้เล็ก (15625 Hz) ที่เอาต์พุต 1 เรารับสัญญาณของฝูงแนวตั้งซึ่งควรไปที่จัมเปอร์ SB4.1 ตัวต้านทาน R2 - R5 ก่อร่างใหม่สัญญาณ รหัสคู่บนเอาต์พุต 1, 2, 3, 4 ของ DD1 ที่เบากว่า แรงดันไฟฟ้าของการไล่ระดับความสว่างมักจะเปลี่ยนแปลงเป็นขั้นๆ แถวดับและซิงโครไนซ์พัลส์ด้วยระยะเวลาการผ่าน 64 µs เกิดจากทริกเกอร์ของวงจร D3 ก่อนการปรากฏตัวของแรงกระตุ้นที่อินพุต R ฟลิปฟล็อป DD3.1 จะอยู่ในสถานีเดียว ป้อนอินพุท R อิมพัลส์ ติดตั้งในศูนย์ค่าย ซึ่งจะทำให้ cob เกิดแรงกระตุ้นแถวซึ่งดับ ทริกเกอร์เปลี่ยนเป็น ค่ายพักร้อนภายใต้การไหลเข้าของ yogo อินพุต 3 ของความแตกต่างในเชิงบวกอื่นซึ่งส่งผลให้ 1 lichilnik DD1 ที่เอาต์พุตผกผันของ flip-flop ให้ดับความสามารของพัลส์เป็นบวก 12 µs ทริกเกอร์ DD3.2 สร้างค่าสามเท่าของพัลส์ซิงค์ขนาดเล็ก 4 µs ด้านหน้าของความล้มเหลวดังกล่าวคือ 2 µs เพื่อดับด้านหน้า ดูแลองค์ประกอบ VD1 และ R6 ซึ่งใช้ในการตั้งค่าการทำงานของ ABO และอินพุตควบคุม D สำหรับทริกเกอร์นี้ พัลส์การซิงค์เฟรมจะถูกแทรกลงในสัญญาณซิงค์แถว ซึ่งควรไปที่อินพุต R ซึ่งเป็นผลมาจากการที่ ผลรวมของพัลส์การซิงค์เกิดขึ้นที่เอาต์พุตนี้ บนไมโครเซอร์กิต DD4, DD6 และองค์ประกอบ DD5.3, DD5.4 สามารถสร้างพัลส์ซิงค์บุคลากรและสัญญาณในเส้นแนวนอนและหมอกควัน การก่อตัวของสัญญาณของ smug ในแนวนอนเกิดขึ้นระหว่างทางเดินของแรงกระตุ้นซึ่งนำมาจากเอาต์พุตของ lichilnik S1 DD4 ผ่านทริกเกอร์ DD6 ด้วยเหตุนี้ความถี่ของการยืดผมจึงเปลี่ยนไปสองครั้ง และการประหยัดจะเท่ากับ 2

ในองค์ประกอบ DD7.1, DD7.2, R14, VD3 มีไฟล์แนบซึ่งในสองสัญญาณขาออกที่ไปที่อินพุตขององค์ประกอบ DD7.1 อันที่สามจะเกิดขึ้น หากต้องการนำช่องตรวจสอบหรือตะแกรงออก ให้กดปุ่ม SB4, SB6 (หมุนวนในแนวตั้งและแนวนอน) หนึ่งชั่วโมง เมื่อคุณกดปุ่ม SB8 ฟิลด์จุดจะถูกลบออก การรวมกันของปุ่มต่างๆ SB1 - SB9 ช่วยให้คุณสามารถดูภาพที่ไม่มีใบหน้าบนหน้าจอได้ สัญญาณวิดีโอล่าสุดของขั้วบวกถูกสร้างขึ้นที่ส่วนเสริมบนองค์ประกอบ VD5 - VD7, R17 - R19 ด้วยการกดปุ่ม SB3, SB4 และ SB6 เป็นเวลาหนึ่งชั่วโมงสัญญาณช่องตรวจสอบจะถูกสร้างขึ้นที่สิ่งที่แนบมาซึ่งเป็นสี่เหลี่ยมจัตุรัสซึ่งเต็มไปด้วยหมอกควันของการไล่ระดับความสว่าง สัญญาณวิดีโอถูกนำมาจากตัวต้านทาน R19 จากตัวเก็บประจุ C3 ไปยังเครื่องกำเนิด RF การมอดูเลตของตัวเก็บประจุของทรานซิสเตอร์ VT1 ถูกปิดใช้งาน คำนำหน้าของเอกสารแนบถูกเลือกในอาคารเดียวกันบนokremіy การชำระเงินอื่น ๆ. ช่วยให้คุณสามารถเปลี่ยนการซิงโครไนซ์สีของหุ่นยนต์และเส้นทางทั้งหมดของเส้นทางของสัญญาณสี ปรับเครื่องตรวจจับความถี่ในบล็อคสี คำนำหน้าช่วยรับรองรูปร่างของภาพที่สุ่มตัวอย่างจากสีที่วาดออกมา ในโหมดการตรวจสอบเครื่องตรวจจับความถี่ซ้ำและการติดตั้งศูนย์ สัญญาณของสีปัจจุบันจะถูกส่งผ่านแถวทั้งฟิลด์

การทำงานของสัญญาณความแตกต่างของสีทั้งเส้นทางในการควบคุมภาพบนหน้าจอของฝูงสี ซึ่งรวมถึงสัญญาณการทดสอบต่างๆ ของเครื่องกำเนิดไฟฟ้าด้วยนั่นเอง แผนภาพหลักของคอนโซลแสดงไว้เล็กน้อย ประกอบด้วยออสซิลเลเตอร์ควอตซ์ที่มีความถี่การซิงโครไนซ์สี 3900 kHz (องค์ประกอบ DD4.1, DD4.2) และ 4756 kHz (DD5.1, DD5.2) และสีชั่วคราว 4250 kHz (DD3.1, DD3.2) และ 4406 kHz ( DD8.1, DD8.2), สวิตช์ความถี่สำหรับการซิงโครไนซ์สี (DD4.3, DD4.4, DD5.3, DD6) และสีซิงโครนัส (DD3.3. DD8.3, DD10), แอดเดอร์ (DD7, R4 - R6 , R9 – R11), เครื่องกำเนิดช่วงเวลานาฬิกา (DD9) และการสร้างพัลส์ (DD1, DD2, DD3.4, DD5.4) คำนำหน้าเปิดใช้งานโดยปุ่ม QB1 พัลส์การซิงค์ขนาดเล็กสามอัน ซึ่งอยู่ที่ส่วนนำหน้าจากเครื่องกำเนิด ทริกเกอร์ DD2.2 จะสร้างพัลส์ของความถี่ pvryadkovo І trivality (64 μs) สำหรับการสลับสัญญาณและการซิงโครไนซ์สี จากเอาต์พุตของทริกเกอร์ กลิ่นเหม็นจะถูกเทลงบนองค์ประกอบ DD5.3 โดยตรงผ่านอินเวอร์เตอร์ DD1.3 ไปยัง DD4.3 เหมือนกับในแถวที่ฉันส่งสัญญาณของความถี่การซิงโครไนซ์สี 4756 และ 3900 kHz ผ่าน แถว. หลังจากการรวมสัญญาณเหล่านี้ในองค์ประกอบ DD4.4 แล้ว แพ็กเก็ตความถี่ของการซิงโครไนซ์สีจะมาในองค์ประกอบ DD6.1 และ DD6.2 นอกจากนี้จากเอาต์พุตของทริกเกอร์ DD2.2 และอินเวอร์เตอร์ DD1.3 พัลส์ของความถี่คำสั่งผ่านหน้าสัมผัส SB2.1 และ SB2.2 จะสลับองค์ประกอบ DD8.3 และ DD3.3 รวมทั้งผ่าน ผ่านสัญญาณความถี่ของสีอุปทาน 4406 และ 4250 kHz บนองค์ประกอบ DD10.1 และ DD10.2 ที่ adder บนองค์ประกอบ DD7, R4 - R6, R9 - R11 สัญญาณของการซิงโครไนซ์สีและการซิงโครไนซ์สีจะถูกเพิ่มและผ่านตัวเก็บประจุ C1 พวกมันไปที่จุดเชื่อมต่อของตัวต้านทาน R17, R18 และไดโอด VD7 ของเครื่องกำเนิด จากนั้นไปที่เครื่องกำเนิดอัตโนมัติ RF เพื่อเติมไอโอดีนของสัญญาณทีวี รูปที่ 5 แสดงกระดานสองด้านสำหรับคำนำหน้าที่เลือก

เครื่องกำเนิดสัญญาณยังมีชีวิตอยู่ด้วยแรงดันไฟฟ้าที่เสถียร ซึ่งไดอะแกรมจะแสดงในลักษณะเล็กน้อย Svіtlodiod HL1 vіdobrazhaєvіmknennya pristroy รายละเอียด. ขดลวดของเครื่องกำเนิดไฟฟ้า L1 ถูกวาง 8 รอบบนสาย PEV-2 0.23 และหมุนเป็นแผลเพื่อเปิดเฟรมที่มีเส้นผ่านศูนย์กลาง 5 และความยาว 15 มม. พร้อมแกนนำร่อง SCR-1 ในเฟรมนี้ มีการเลี้ยวของลิงค์ L2 จากลูกดอกเดียวกัน Transformer T1 - ไม่ว่าจะเป็นขนาดเล็กการขยายตัวของดีดที่ขดลวดทุติยภูมิน้อยกว่า 0.3 A ที่แรงดันเอาต์พุต 8 U รายละเอียดทั้งหมดของเครื่องกำเนิดสัญญาณในการติดตั้งบอร์ดอื่นสองด้าน กระดานแสดงจากสองด้านไปยังส่วนเล็ก 4 ตัวสะท้อนเสียงควอตซ์ในสิ่งที่แนบมาสามารถแทนที่ด้วยวงจรคอยล์สุดท้ายซึ่งสามารถพันได้เมื่อถึงเทิร์นด้วยลวด PEV-2 0.23 บนเฟรมยางที่มีเส้นผ่านศูนย์กลาง 7 มม. จากสิ่งที่แนบมา SCR-1 (ในกรณีของเครื่องรับวิทยุ Meridian) ที่ความถี่ 3900 kHz สำหรับเครื่องรับ 4 MHz สำหรับเครื่องกำเนิดไฟฟ้า ขดลวดวงจรแต่ละอันควรเป็น 75 รอบ ความจุของตัวเก็บประจุคือ 62 pF ที่ความถี่ 4756 kHz ควรวางคอยล์ 60 รอบความจุของตัวเก็บประจุคือ 51 pF ที่ความถี่ 4250 kHz - 58 รอบตัวเก็บประจุ 68 pF ที่ความถี่ 4406 kHz - 48 รอบตัวเก็บประจุ 82 pF

การตั้งค่าเครื่องกำเนิดสัญญาณ เมื่อวงจร 4 MHz ถูกปรับในเครื่องกำเนิดไฟฟ้าที่เชื่อมต่อกับทีวี ขั้นตอนแรกคือการซิงโครไนซ์แถวที่เสถียรบนหน้าจอทีวี จากนั้นกดปุ่ม SB5, SD7 ฟิลด์จะถึงความสม่ำเสมอของด้านข้าง ของสี่เหลี่ยม หากต้องการปรับเส้นขอบที่คอนโซล ให้เปิดปุ่ม SB9 บนเครื่องกำเนิดไฟฟ้า - กลับด้าน และบนคอนโซล QB1 และ SB1 (หมอกควันสีน้ำเงินและสีเขียว) เมื่อรวมรูปร่าง 4756 kHz แล้ว พวกมันจะได้ภาพที่มีเสถียรภาพของฝูงสีเทอร์ควอยซ์ จากนั้นเมื่อปรับรูปร่าง 3900 kHz จะเป็นสีเขียวสดใส จากนั้น กดปุ่ม SB1 และปรับเส้นขอบเป็น 4250 และ 4406 kHz เพื่อขจัดแสงหมอกควันสีแดงและสีขาว หากหมายความว่า AGC ถูกปรับอย่างไม่ถูกต้องในทีวีเมื่อเชื่อมต่อเครื่องกำเนิดสัญญาณ ภาพอาจถูกสร้างขึ้น จำเป็นต้องปรับ AGC ที่เครื่องทีวี ผู้ออกแบบคือ Valery Ivanov อีเมล: [ป้องกันอีเมล]
ตัวจับเวลาสร้างช่วงเวลารายชั่วโมงของค่าความสามารที่ตั้งไว้ล่วงหน้า นาฬิกา 1 คำนึงถึงจำนวนพัลส์ และหากจำเป็น ให้เปลี่ยนช่วงเวลารายชั่วโมงที่สร้างขึ้นโดยตัวจับเวลา Lіchilnik 2 vіdrakhovuє nebhіdnu іlkіst іmpulsіv і, razrahuvavіในค่าที่กำหนดไว้ล่วงหน้า, ตัวจับเวลาzupinyaє
ฉันจะสร้างอัลกอริทึมหุ่นยนต์
ตัวจับเวลา T1 จะสร้างช่วงเวลารายชั่วโมงของค่าทริวาลิตีที่กำหนด หลังจากที่ช่วงเวลาดังกล่าวเสร็จสิ้นในรูปแบบของการรีเซ็ต ซึ่งจะอัปเดตค่าดังกล่าว ในลักษณะนี้ เป็นไปได้ที่จะกำหนดว่าลำดับของแรงกระตุ้นมาจากพารามิเตอร์ใดๆ
โปรแกรมย่อยรีเซ็ตเริ่มต้นจากการรีเซ็ต - หากไม่มีพัลส์เหลืออยู่ ตัวจับเวลาจะเริ่มขึ้นราวกับว่ายังคงอยู่ เช่นเคย การทดสอบซ้ำจะดำเนินการ ไม่ว่าจะเป็นพัลส์หรือหยุดชั่วคราวระหว่างพัลส์ (ระยะเวลาอิมพัลส์ - 2500 μs ระยะเวลาหยุดชั่วคราว - 7500 μs) ตามลำดับนี้ ช่วงเวลาของพัลส์และการหยุดชั่วคราวทุกชั่วโมงจะเกิดขึ้นตามความถี่

คำอธิบายของ CTC mode
โหมดข้ามตัวจับเวลา pіd h zbіgu (STS)

ข้าว. 1. บล็อกไดอะแกรมของ T0
ในโหมด STS (WGM01, WGM00 = 0b10) การลงทะเบียน OCR0 จะถูกตรวจสอบเพื่อกำหนดค่าเช่าของผู้เช่า ทุกครั้งที่มีการตั้งค่าโหมด CTC และค่าตัวระบุ (TCNT0) ถูกตั้งค่าเป็นค่าของการลงทะเบียน OCR0 ตัวระบุจะถูกรีเซ็ตเป็นศูนย์ (TCNT0=0) ในลำดับนี้ OCR0A จะตั้งค่าส่วนบนของ rahunka ของครอกและส่วนที่สองของอาคารด้วย ที่ โหมดนี้การควบคุมความถี่ของอิมพัลส์เป็นเส้นตรงที่สร้างขึ้นได้หลากหลายยิ่งขึ้น
ในโหมดรีเซ็ตตัวจับเวลาเมื่อเริ่มต้น (WGMn3-0 = 0b0100 หรือ 0b1100) ช่วงเวลาของตัวจับเวลาจะถูกกำหนดโดยการลงทะเบียน OCR0A ในโหมด CTC จำเป็นต้องมีการรีเซ็ต lichnik (TCNT0) ซึ่งหมายความว่าค่าของการจับคู่จะอยู่ในค่าของการลงทะเบียน OCR0A ในโหมดนี้ สามารถควบคุมความถี่ของพัลส์เส้นตรงที่สร้างขึ้นได้ ไดอะแกรมรายชั่วโมงของการทำงานของตัวจับเวลาในโหมด STS จะแสดงเป็นขนาดเล็ก 1 ตัวจับเวลา (TCNTn) จะเพิ่มเวลาจนกว่าจะถึงค่า OCR0A จากนั้นตัวจับเวลา (TCNT0) จะถูกละทิ้ง

ข้าว. 2 ไดอะแกรมกำหนดเวลาสำหรับโหมด STS
Crimium ลดลงเมื่อคุณสามารถสร้างการเปลี่ยนแปลงสำหรับธงเพิ่มเติม OCF0A ซึ่งเป็นทะเบียนระดับสูงซึ่งได้รับชัยชนะสำหรับงานของขอบเขตบนของ rahunka แม้ว่าจะอนุญาตให้ทำการผลัดผิวใหม่ แต่ก็สามารถดำเนินการปรับผิวใหม่เพื่อปรับเส้นขอบบนของหน้าอกได้
ในการสร้างสัญญาณในโหมด CTC สามารถเปลี่ยนเอาต์พุต OC0A เพื่อเปลี่ยนระดับตรรกะในกรณีของโทนสีผิว ซึ่งจำเป็นต้องตั้งค่าโหมดปิดเสียง (COM0A1, COMA0 = 0b01) ค่า OC0A จะปรากฏบนพอร์ตเอาต์พุต เฉพาะสำหรับเอาต์พุตของงานเอาต์พุตโดยตรงเท่านั้น ความถี่สูงสุดสัญญาณที่สร้างขึ้นจะเท่ากับ fOC0 = fclk_I/O/2 ดังนั้น OCRnA = 0x0000 สำหรับค่าอื่น ๆ ของ OCRn ความถี่ของสัญญาณที่จะสร้างสามารถกำหนดได้โดยสูตร:

de change N กำหนดค่าสัมประสิทธิ์พรีสเกลเลอร์ (1, 8, 32, 64, 128, 256 หรือ 1024)
โปรแกรม
รวม "m16def.inc"
rjmp รีเซ็ต; รีเซ็ตตัวจัดการ
เรติ; ตัวจัดการ IRQ0
reti;;rjmp EXT_INT1 ;IRQ1 ตัวจัดการ
เรติ; เรติ; jmp; TIM2_COMP; Timer2 เปรียบเทียบ Handler
เรติ;;เรติ;jmp;TIM2_OVF; ตัวจัดการโอเวอร์โฟลว์ Timer2
เรติ; ;reti;jmp;TIM1_CAPT; ตัวจัดการการจับภาพ Timer1
jmp TIM1_COMPA; Timer1CompareA Handler
reti;reti;jmp;TIM1_COMPB; Timer1 CompareB Handler
reti;reti;jmp;TIM1_OVF; ตัวจัดการโอเวอร์โฟลว์ Timer1
reti;;reti;jmp;TIM0_OVF; ตัวจัดการโอเวอร์โฟลว์ Timer0
reti;;reti;jmp;SPI_STC; SPI Transfer ตัวจัดการที่สมบูรณ์
เรติ;;เรติ;jmp;USART_RXC; USART RX ตัวจัดการที่สมบูรณ์
reti;;reti;jmp;USART_UDRE ; UDR ตัวจัดการว่าง
reti;reti;jmp; USART_TXC; USART TX ตัวจัดการที่สมบูรณ์
reti;reti;jmp; เอดีซี; ADCConversion ตัวจัดการที่สมบูรณ์
reti;reti;jmp ;EE_RDY ;EEPROM พร้อมตัวจัดการ
เรติ; เรติ; jmp; ANA_COMP; ตัวจัดการเปรียบเทียบแบบอะนาล็อก
reti;reti;jmp ;TWSI ;ตัวจัดการอินเทอร์เฟซแบบอนุกรมสองสาย
เรติ; เรติ; jmp; EXT_INT2; ตัวจัดการ IRQ2
เรติ; Timer0 เปรียบเทียบตัวจัดการ
reti;reti;jmp SPM_RDY ;จัดเก็บโปรแกรม Memory Ready Handler
ldi r16 สูง (2500)
ldi r16 ต่ำ (2500)
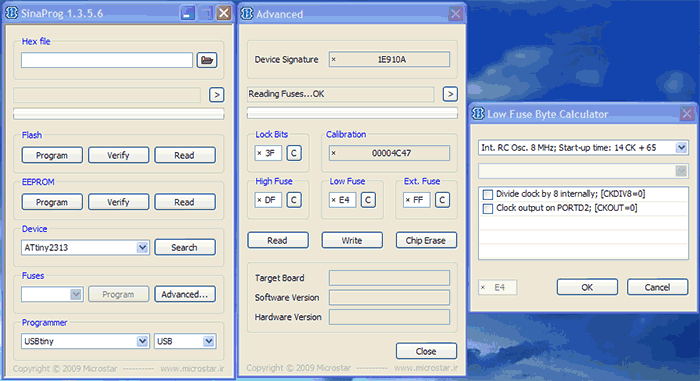
ldir16, (1< ldir16, (1< ldir16, (1< ldi r16 สูง (RAMEND) ldi r16 ต่ำ (RAMEND) ออก SPL,r16 ;เริ่มต้น stack se ; เปิดใช้งานการขัดจังหวะ main: ;ห่วงหลัก ldi r16 สูง (2500) ldi r16 ต่ำ (2500) ldi r16 สูง (7500) ldi r16 ต่ำ(7500) หลังจากการเริ่มไมโครคอนโทรลเลอร์ โพรซีเดอร์การเริ่มต้น (RESET) จะถูกเรียกใช้ สำหรับโปรแกรมย่อยนี้ตามลำดับ: ปรับพอร์ตและ I/O (พอร์ต D ถูกปรับสำหรับการดู) ตั้งค่าหุ่นยนต์จับเวลา T1: ตัวเลข (2500) ถูกป้อนลงในทะเบียน Visnovok OC1A เปลี่ยนเป็น "ย้อนกลับ" เท่ากับเมื่อเปลี่ยนการลงทะเบียนที่ถูกต้องและการลงทะเบียนที่ถูกต้อง (OCR1A) มีการตั้งค่าโหมดการทำงาน (ลื่นไถลสำหรับzbіg) และสัญญาณนาฬิกา dzherelo (ไม่มีพรีสเกลเลอร์ตามสัญญาณนาฬิกาของระบบ) หุ่นยนต์ได้รับอนุญาตให้รีสตาร์ทเพื่อเพิ่ม T1 สแต็กเริ่มต้นแล้ว (ตั้งค่าบนสุดของสแต็กแล้ว) ได้รับอนุญาตแล้ว การกำหนดค่าเริ่มต้นของคอนโทรลเลอร์ใดเสร็จสมบูรณ์ เราให้คำสั่ง "ide" จำนวนหนึ่งแก่ลูปหลัก ในกรณีที่การรีเซ็ตล้มเหลว โปรแกรมย่อยการประมวลผลการรีเซ็ต TIM1_COMPA เริ่มต้นขึ้น โดยเริ่มต้นด้วยการเพิ่มจำนวนการรีเซ็ต (ตั้งลำดับแปดพัลส์และเป้าหมายคือ 16 "เปลี่ยนบรรทัด") จำนวนการรีเซ็ต เริ่มต้นใหม่จาก 16 พัลส์ ดังนั้นจึงปล่อยหนึ่งพัลส์ มีตัวจับเวลา (ศูนย์รีจิสเตอร์คีย์ของไมโครคอนโทรลเลอร์) แม้ว่าจำนวนการหยุดชะงักจะน้อยกว่า 16 โปรแกรมก็อยู่ห่างออกไปสามปี การตรวจสอบซ้ำของธงสัญญาณชีพจร breq และทันทีที่มีการตั้งค่า โปรแกรมย่อยของพัลส์จะเริ่มต้นขึ้น การลงทะเบียนออฟเซ็ตจะได้รับการอัปเดต (หมายเลข 7500 ถูกยึด) และธงสัญญาณจะหายไป ในระดับดังกล่าว เพื่อความชัดเจนของธงธง หมายเลข 2500 และ 7500 ถูกกำจัด และเมื่อพบเห็น OC1A ลำดับของการซ้อมรบ 4 (สำหรับคำสั่ง) จะเกิดขึ้น โพรบกำเนิดของการเลือกสัญญาณทีวีบนพื้นฐานของไมโครคอนโทรลเลอร์ซีรีส์ pic12f629 และเนื่องจากความซับซ้อนของขนาด การบดอัดของสตรีม ความแปรปรวนของการเตรียมการ อุปกรณ์เสริมสำหรับ telemaster จึงเป็นสิ่งที่ขาดไม่ได้ แรงดันไฟฟ้าของชีวิตคือ 3 โวลต์ tobto แบตเตอรี่สองนิ้ว ปริมาณการใช้ดีดในโหมดการสร้างคือ 11 mA ในโหมดสลีป - รวมเป็น 3 mA ในการสร้างสัญญาณวิดีโอ ไมโครคอนโทรลเลอร์เพียงตัวเดียวและตัวต้านทานสองตัวก็เพียงพอแล้ว ดังนั้นคุณสามารถสร้างเครื่องกำเนิดสัญญาณวิดีโอขนาดเล็กจากคีย์ fob ได้อย่างแท้จริง สิ่งที่แนบมาดังกล่าวจะกลายเป็นเรื่องดีสำหรับเทเลมาสเตอร์ Yogo สามารถได้รับชัยชนะด้วย kinescope โดยปรับความบริสุทธิ์ของสีและความเป็นเส้นตรง หุ่นยนต์เครื่องกำเนิดไฟฟ้ามีลักษณะเหมือนกัน การสลับระหว่างฟิลด์เกิดจากการกดปุ่ม S2 ในชั่วโมงสั้นๆ (น้อยกว่า 1 วินาที) กดปุ่มในสถานีที่กดค้างไว้สามชั่วโมง (สูงสุด 1 วินาที) จนกว่าเครื่องกำเนิดไฟฟ้าจะปิด (ไมโครคอนโทรลเลอร์ไปที่สถานี "SLEEP") เครื่องกำเนิดถูกเพิ่มโดยกดปุ่ม S1 เกี่ยวกับแคมป์ของสิ่งที่แนบมา (เข้า/ออก) สัญญาณไฟ. ลักษณะทางเทคนิคของอุปกรณ์เสริม: โครงการ สำหรับการกำหนดรูปแบบสัญญาณวิดีโอ ศูนย์บิตของ PORTA และ PORTB ทั้งหมดจะถูกแทนที่ (พอร์ตนี้ทำงานในโหมด suvu ไม่ว่าจะรับสัญญาณจากศูนย์บิตที่ 1 เท่านั้นโปรแกรมจะเอาชนะสิ่งทั้งหมด ดังนั้น PORTB บิตทั้งหมดจะถูกตั้งค่าตามที่คาดไว้) บิตแรกของ PORTA คือ ตีเพื่อแสดงเครื่องกำเนิดไฟฟ้า หากสิ่งที่แนบมาได้รับการแก้ไข แสงจะไหม้ หากสิ่งที่แนบมาเสีย - แสงแห่งการชำระคืน บิตที่สามของ PORTA เล่นเพื่อสลับโหมดในเครื่องกำเนิดหุ่นยนต์และปิดการทำงาน การกดปุ่ม S2 สั้นๆ จะทำให้ฉันสามารถสลับจากฟิลด์หนึ่งของตัวสร้างไปยังอีกฟิลด์หนึ่งได้ เมื่อกด ปุ่มที่สถานีกดจะยาวกว่า 1 วินาที prilad wimikaetsya (ไมโครคอนโทรลเลอร์ไปที่โรงสี "SLEEP") เพื่อที่จะเพิ่มตัวสร้าง จำเป็นต้องลบข้อมูลออก จุดประสงค์คือการกดปุ่ม S1 แรงดันไฟฟ้าของอายุการใช้งานของสิ่งที่แนบมาสามารถเลือกได้ระหว่าง 3 - 5 V ข้อผิดพลาดใด แต่จะเลือกค่าของตัวต้านทาน โปรแกรม. Rozgin PIC16F84. พร้อม. ฉันทำงานเกี่ยวกับอุปกรณ์อิเล็กทรอนิกส์ ฉันต้องการใช้เครื่องกำเนิดสัญญาณในรูปแบบต่างๆ เมื่อเร็วๆ นี้ ฉันต้องใช้สัญญาณไซน์เพื่อขอความช่วยเหลือจากวิธีดิจิทัล และเห็นว่าจะได้เครื่องกำเนิดไฟฟ้าที่ดีเป็นของตัวเอง! ด้วยเหตุนี้ ฉันจึงได้สร้างเครื่องกำเนิดสัญญาณที่เรียบง่าย แต่ใช้งานได้จริง ซึ่งสามารถสร้างได้: คลื่นสี่เหลี่ยม, ไตรคัทนิก, ไซน์, สัญญาณรบกวน และสัญญาณฟันเลื่อย ความถี่สูงสุดที่สามารถสร้างได้คือ 60kHz (กิโลเฮิรตซ์) ในขณะที่อยู่ในเฟิร์มแวร์ที่ถูกต้อง ความถี่สามารถตั้งค่าได้เฉพาะสำหรับการสร้างคดเคี้ยว สำหรับสัญญาณอื่นๆ คุณสามารถตั้งค่าการเฟดได้เฉพาะในไมโครวินาที พื้นฐานของโปรแกรมเสริมคือไมโครคอนโทรลเลอร์ AVR ATtiny2313 สัญญาณถูกสร้างขึ้นหลังความช่วยเหลือของตัวแปลงดิจิทัลเป็นอนาล็อก (DAC) 8 บิตข้อมูลเกี่ยวกับความถี่สัญญาณหรือสัญญาณรบกวนจะแสดงบน RK ตัวบ่งชี้ 8x2 แผนภาพหลักการแกน: สำหรับการเลือก จำเป็นต้องมีรายละเอียด: DAC ถูกเลือกบนตัวต้านทานและเชื่อมต่อโดยตรงกับพอร์ต B ของไมโครคอนโทรลเลอร์ สัญญาณหลังจาก DAC ถูกใช้เพื่อขอความช่วยเหลือจากสวิตช์การทำงาน LM324 ตัวบ่งชี้ PK I zastosuvav WH0802 พร้อมตัวควบคุม summіsnym, PKI ของเดนมาร์กอาจมี 2 แถวจาก 8 สกิน Іtotno zastosuvannya ของตัวบ่งชี้ RK ชนิดใดก็ได้จากตัวควบคุมทั้งหมดจาก HD44780 ไมโครคอนโทรลเลอร์ Attiny2313 สามารถติดกับดัชนีตัวอักษรใด ๆ ได้ ไม่ว่าในกรณีใด ปุ่มต่างๆ สามารถบิดเป็นวงกลมได้โดยไม่ต้องยึด ปุ่ม "เลือก" เลือกประเภทของสัญญาณที่จะสร้าง ใช้ปุ่ม "บวก" และ "ลบ" เพื่อตั้งค่าความถี่หรือเฟด เมื่อเปิดสิ่งที่แนบมา ฉันจะเริ่มสร้างสัญญาณทันที สำหรับการล็อคของคดเคี้ยว แรงดันไฟขณะใช้งาน: 5 โวลต์ แกนของออสซิลโลแกรมที่สร้างโดยเครื่องกำเนิดสัญญาณ: ฉันเลือกเครื่องกำเนิดสัญญาณในตัวเรือนพลาสติก ZIV ซึ่งแกนคือ: การทดสอบครั้งแรกพร้อมกันด้วยออสซิลโลสโคปในตัว: ฉันเลือกรูปแบบการชำระเงินอื่น ๆ เพื่อขอความช่วยเหลือ การชำระเงินเพิ่มเติมเล็กน้อยสามารถพบได้ในไฟล์ก่อนบทความ บนกระดาน ฉันปรับแต่งรายละเอียดในเคส SMD ไมโครเซอร์กิต LM324 มีโอกาสน้อยที่จะกลายเป็นชิป และเคส DIP ไม่มีการบิดเบี้ยว ฉันจะเพิ่มเฟิร์มแวร์สำหรับส่วนเสริมในช่วงกลางของสุดสัปดาห์ BASCOM-AVR นอกจากนี้ ฉันจะเพิ่มโครงการในโปรแกรม ก่อนพูด หลังจากเฟิร์มแวร์ อย่าลืมติดตั้ง f'uzi biti ต่อไปนี้ (สำหรับโปรแกรม SinaProg): ATtiny2313 LM324 2 ห้อง 1 ห้อง 10 ห้อง 300 โอห์ม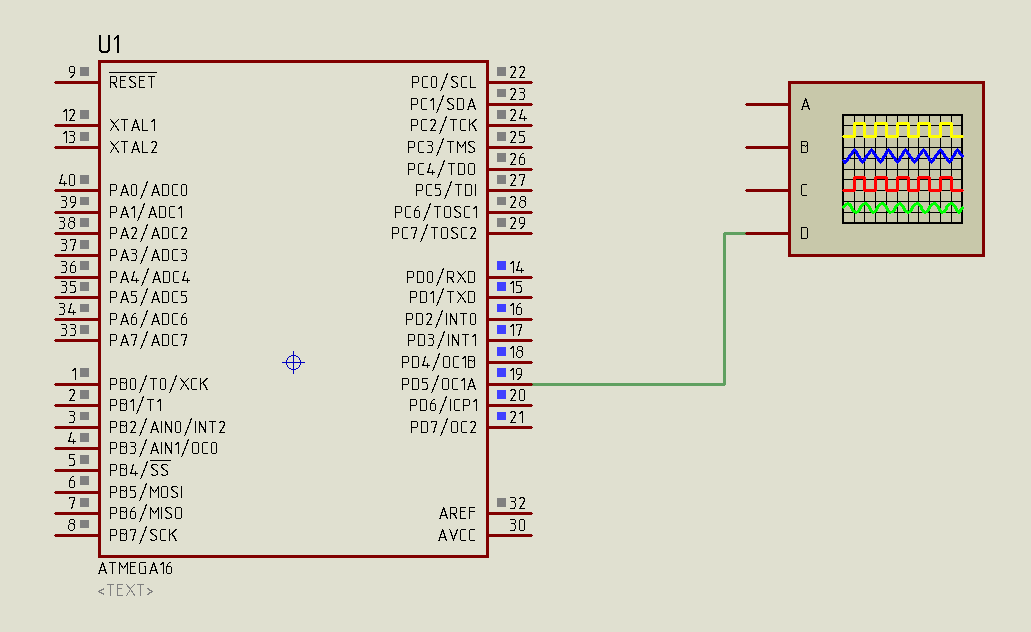
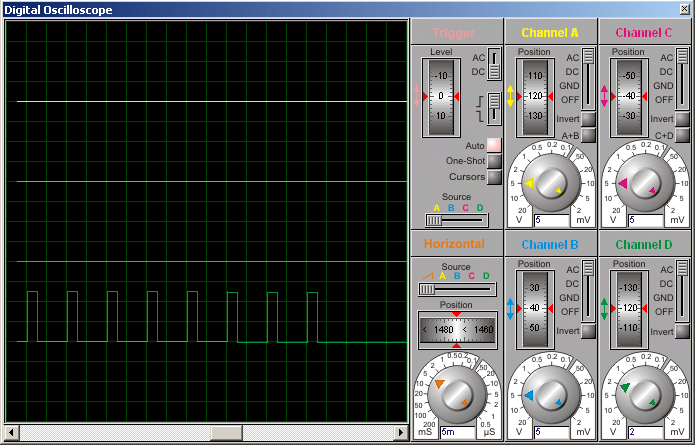
ผลการจำลองวงจรในโปรแกรม PROTEUSแผนผังของเครื่องกำเนิดสัญญาณ TB

ลูกของการจ่ายเงินดาวน์

หัววัดนี้สามารถสร้างภาพได้ห้าภาพ ซึ่งเพียงพอสำหรับการตรวจสอบซ้ำและการซ่อมแซมเครื่องรับโทรทัศน์ขนาดเล็ก การตัดบุคลากร การควบคุมเอาต์พุตและรูปแบบเรขาคณิตของแรสเตอร์ ความสมดุลของสี การควบคุมการส่งสัญญาณไปตามช่องสัญญาณของ ชุดทีวี. ด้วยการกดที่ปุ่มในช่วงเวลาสั้นๆ ไวน์จะถูกโยนและเริ่มสร้างภาพถัดไป ด้วยความกดดันที่ไม่เหมาะสม รูปภาพเหล่านั้นจึงเคลื่อนไปบนเสา เมื่อกดปุ่ม ในขณะที่เครื่องกำเนิดไฟฟ้าถูกปล่อย มันจะเปลี่ยนเป็นโหมดสลีป นอกจากนี้ยังจะเปลี่ยนเป็นโหมดสลีปโดยอัตโนมัติหากมีการเปิดเครื่องมากกว่า 5 ครั้ง 
คลังข้อมูลถูกเพิ่มลงในบทความซึ่งมีวงจร, บอร์ดโพรบ, เฟิร์มแวร์สองตัว ในวิดีโอคุณจะเห็นว่าภาพบนทีวีของฉันไม่เป็นเส้นตรง - มันเหมือนกับทีวีที่มีอายุ 12 ปีและอาจไม่เหมือนกันที่ทางเข้า
เครื่องกำเนิดไฟฟ้าเชื่อมต่อกับอินพุตวิดีโอของทีวี เสียงเหมือน "ทิวลิป" หรือ "SCART"
อุปกรณ์สร้างหกฟิลด์:
- ช่องข้อความ 17 แถว;
- ตาข่าย 8x6;
- ตาข่าย 12x9;
- ช่องตรวจสอบอื่น 8x6;
- สนามหมากฮอสขนาดใหญ่ 2x2;
- ทุ่งขาว.

- ความถี่สัญญาณนาฬิกา - 12 MHz;
- แรงดันไฟฟ้าของชีวิต 3 - 5 V;
- ดีดในโหมดการทำงาน:
- ที่แรงดันไฟฟ้า 3V - ใกล้ 5mA;
- ที่แรงดันไฟฟ้า 5V - ใกล้กับ 12mA;
- อัตราเฟรม - 50 Hz;
- จำนวนแถวต่อเฟรม - 625 
โครงการนี้ค่อนข้างง่าย
ผลงานทั้งหมดจากแบบฟอร์ม
สัญญาณวิดีโอ
พ่ายแพ้โดยโปรแกรม
เย็บไมโครคอน-
รถเข็นเด็ก ตัวต้านทานสองตัว
พร้อมสนับสนุน
อินพุตวิดีโอทีวี
ดูแลเท่าที่จำเป็น
แรงดันไฟฟ้าที่เท่ากันของฉัน
สัญญาณวิดีโอ:
- 0 V - การซิงโครไนซ์;
- 0.3 V - รูบาร์บสีดำ
- 0.7 V - rіvenสีเทา;
- 1 V - rіvenสีขาว
3V ... - R5 = 456Ω และ R6 = 228Ω
3.5V - R5 \u003d 571 โอห์มและ R6 \u003d 285 โอห์ม
4V ... - R5 = 684Ω และ R6 = 342Ω
4.5V - R5 \u003d 802 โอห์มและ R6 \u003d 401 โอห์ม
5V...- R5=900Ω และ R6=450Ω
นี่คือความหมายของ Rozrahunka ในความเป็นจริง คุณสามารถใส่ตัวต้านทานในแถวมาตรฐานได้ ตัวอย่างเช่น 5V - 910 Ohm และ 470 Ohm และสำหรับ 3V - 470 Ohm และ 240 Ohm
แรงดันไฟของเครื่องกำเนิดไฟฟ้าอาจน้อยกว่า 3V สำหรับ PIC เฉพาะสกิน ควรพิจารณาขั้นต่ำในการทดลอง ตัวอย่างเช่นฉันมีการเปิดตัว PIC 20MHz ในปี 2544 สำหรับ 2.3 Art
โปรแกรมแบบฟอร์ม 6 ช่อง ฟิลด์สกินประกอบด้วย 301 แถว (300 แถวข้อมูล + หนึ่งสีดำ) จำนวนภาพคือ 305 (625 แถวในแรสเตอร์ - 15 แถวในการซิงโครไนซ์เฟรม = 610 ข้อมูลในเฟรมจะแสดงตลอดแถว (ดูรายละเอียดเพิ่มเติมที่นี่) tom 610/2 = 305) แต่ด้วยจำนวนแถวดังกล่าวแรสเตอร์จะขยายในแนวตั้งมีอีกสามแถวที่สร้างสัญญาณวิดีโอซึ่งออกอากาศโดยศูนย์โทรทัศน์
แถวแรกในผิวหนัง polychryonium ในชั่วโมงนี้ มีการใช้สถานีของปุ่ม S2 คำนวณชั่วโมงของเช้าในสถานีที่กด และจำเป็นต้องย้ายจากฟิลด์หนึ่งไปยังฟิลด์ถัดไป
ฟิลด์กราฟิกมีความโค้งเล็กน้อยของเส้นแนวตั้ง ด้วยเหตุนี้ จำนวนแถวสุดท้ายจึงยาวกว่าแถวอื่นๆ สองสามรอบ เนื่องจากจำเป็นต้องติดตั้งวงจร lichnik โดยทั่วไป โปรแกรมที่สร้างฟิลด์กราฟิกนั้นง่ายกว่า ดังนั้นจึงไม่จำเป็นต้องแสดงความคิดเห็น
มาพูดถึงส่วนนั้นของโปรแกรมที่สร้างช่องข้อความกัน นี่คือที่ที่ดีที่สุดสำหรับโปรแกรมที่ใช้พื้นที่ส่วนใหญ่ ซึ่งเป็นทรัพยากรสูงสุดของไมโครคอนโทรลเลอร์ (หน่วยความจำทั้งหมดของสิ่งเหล่านี้เป็นส่วนสำคัญของ RAM) นี่คือข้อมูลโค้ดบางส่วนที่นำมาจาก Gri Pong โดย Rickard Gunee
ฟิลด์ข้อความสามารถซ้อนกันได้ถึง 17 แถว หนังสามารถซ้อนได้ไม่เกินแปดตัวอักษร สัญลักษณ์จะแสดงเป็นแถว ดังนั้นข้อความหนึ่งแถวใช้แรสเตอร์ 17 แถว (ลักษณะการทำงานนี้เกิดจากความสามารถที่จำกัดของ PIC) ข้อมูลเกี่ยวกับกำหนดการอักขระถูกเก็บไว้ในหน่วยความจำโปรแกรมของตารางการแจกจ่าย ข้อมูลเกี่ยวกับข้อความของแถวนั้นนำมาจากหน่วยความจำของข้อมูล (64 คำ = 8 แถว 8 ตัวอักษร) ตัวอย่างเช่น ที่แถว 08h (ที่อยู่จาก 08h ถึง 0Fh) จะถูกเขียนไปข้างหน้า: 20.60.48.50.90.58.20 20. ค่าสกิน - พิกัด (zsuv ใน cob) ของสัญลักษณ์ในตาราง มูลค่า.20. ยืนยันการทดสอบ, .60. - ตัวอักษร "B", .48 - ตัวอักษร "ฉัน" เป็นต้น และฉันก็สร้าง "_VIDEO" ขึ้นมาทันที
มาดูที่ก้นว่าจะแสดงข้อความอย่างไร จำเป็นต้องป้อนข้อมูลที่บรรทัดข้อความที่ 12 ของหน้าจอขึ้นอยู่กับโปรแกรมเพื่อให้จำเป็นต้องใช้หน่วยความจำข้อมูลบรรทัด 28h (A0 B8 68 C8 D8 70 E0 D0) ในอันดับนี้ ใน 17 แถวถัดไปของแรสเตอร์ จะเห็นข้อความ: "รูปที่ 1 6 f 8 4" น่าจะเป็นแบบนั้น. แถวแรกจาก 17 แถวมีหมุดสีดำพิเศษ ใน qi 64 µs ในขณะที่แถวสีดำแสดงบนหน้าจอ การลงทะเบียน RAM จะถูกเขียนทับโดย "ค่าบน" ของสัญลักษณ์: 00h.vіd "p", 08h vіd "i", 00h vіd "c" 18h vіd "1" และอื่นๆ ภายใต้ชั่วโมงของแถวถัดไป ข้อมูลจะถูกส่งไปยัง PORTB ตามลำดับ ดังนั้นเอาต์พุตวิดีโอ แถวที่สามเป็นสีดำอีกครั้ง เป็นเวลาหนึ่งชั่วโมงїї vykonannya บัฟเฟอร์จะถูกเขียนใหม่ค่าอักขระ "สัตว์อื่น": 00h.vіd "p", 00h vіd "i", 00h vіd "c" 1Ch vіd "1"... ในแถวที่สี่ ข้อมูลจะถูก ที่แสดงบนหน้าจอ ไปเรื่อยๆ จนกว่าแถวทั้งหมดจะถูกดึงออกมา
โปรแกรมย่อย HR Synchronization นำมาจาก Gri Pong โดย Rickard Gunee โปรแกรมย่อย Tsya สั้น แต่สับสน อธิบายยังไง ใช้งานยังไง ดูแล้วดีขึ้น งงๆ มากขึ้น เป็นการดีที่สุดที่จะใส่ข้อความที่ได้รับคำสั่งจากโปรแกรมย่อยและออสซิลโลแกรมขนาดเล็กของพัลส์การซิงค์บุคลากร และอย่ารีบเร่งที่จะเรียงลำดับแถวสกินไปที่โค้ด ฉันจะบอกว่าโปรแกรมย่อยไม่ได้เริ่มต้นจากแถวบนสุด แต่จากตรงกลาง (:-)) เช่นเครื่องหมาย "vertsync"
ดังจะเห็นได้จากแผนภาพในโครงการนี้ ไมโครคอนโทรลเลอร์ทำงานที่ความถี่ 12 MHz วันนี้ PIC16F84 ออกวางจำหน่ายสามเวอร์ชัน: ที่ 4MHz ที่ 10MHz และ 20MHz (ณ วันที่ 1.1.2002 การเปลี่ยนแปลงราคาใกล้เคียงกันคือ 3.5 ดอลลาร์ 5.3 ดอลลาร์ และ 6.3 ดอลลาร์สหรัฐฯ) ในโครงการ Pong Rickard Gunee ของเขา เขายืนยันว่า 4 MHz PIC16F84 ได้รับชัยชนะและทำงานเป็นเวลาหลายปีที่ความถี่ 12 MHz โดยไม่มีปัญหา ฉันลองแล้วและโดยปกติแล้ว PIC 4MHz จะทำงานบนความถี่ราวกับว่าสองครั้ง (!!!) เกินความถี่ที่อนุญาต (แม้ว่าฉันไม่ได้ลองเศษส่วนและเปิดเครื่องกำเนิดน้อยกว่า sprat ของ whilin) ที่ 4MHz PICA อัตราดีดจะสูงขึ้น 10...20% ต่ำกว่าที่ 20MHz (เสียง อาจลดลงตามความถี่ด้วยซ้ำ) ฉันคิดว่าไมโครคอนโทรลเลอร์ 10 MHz สามารถขยายได้ถึง 12 MHz โดยไม่มีความเสี่ยง แต่ในโครงการเชิงพาณิชย์ซึ่งเห็นได้ชัดว่าทำงานได้ไม่ดี
1. ไมโครคอนโทรลเลอร์ Attiny2313 - 1 ชิ้น
2. RK indicator WH0802 หรือ HD44780 ผลรวม - 1 ชิ้น
3. ชิป LM324 - 1 ชิ้น
4. ปุ่มนาฬิกาโดยไม่ต้องตรึง - 3 ชิ้น
5. ตัวต้านทาน 10 kOhm - 1 ชิ้น
6. ตัวต้านทาน 300 โอห์ม - 1 ชิ้น
7. ตัวต้านทาน 2 กิโลวัตต์ - 8 ชิ้น
8. ตัวต้านทาน 1 กิโลวัตต์ - 9 ชิ้น





รายการองค์ประกอบวิทยุ
การนัดหมาย
พิมพ์
นิกาย
Kіlkist
บันทึก คะแนน แผ่นจดบันทึกของฉัน
U1
MK AVR 8 บิต 1
ทำแผ่นจดบันทึก
U2
ผู้ช่วยปฏิบัติการ 1
ทำแผ่นจดบันทึก
R1-R8
ตัวต้านทาน 8
ทำแผ่นจดบันทึก
R9-R16, R18
ตัวต้านทาน 9
ทำแผ่นจดบันทึก
R17
ตัวต้านทาน 1
ทำแผ่นจดบันทึก
R19
ตัวต้านทาน 1
ทำแผ่นจดบันทึก
BTN1-BTN3
ปุ่ม โดยไม่ต้องตรึง 3










